In context of
Calm technology
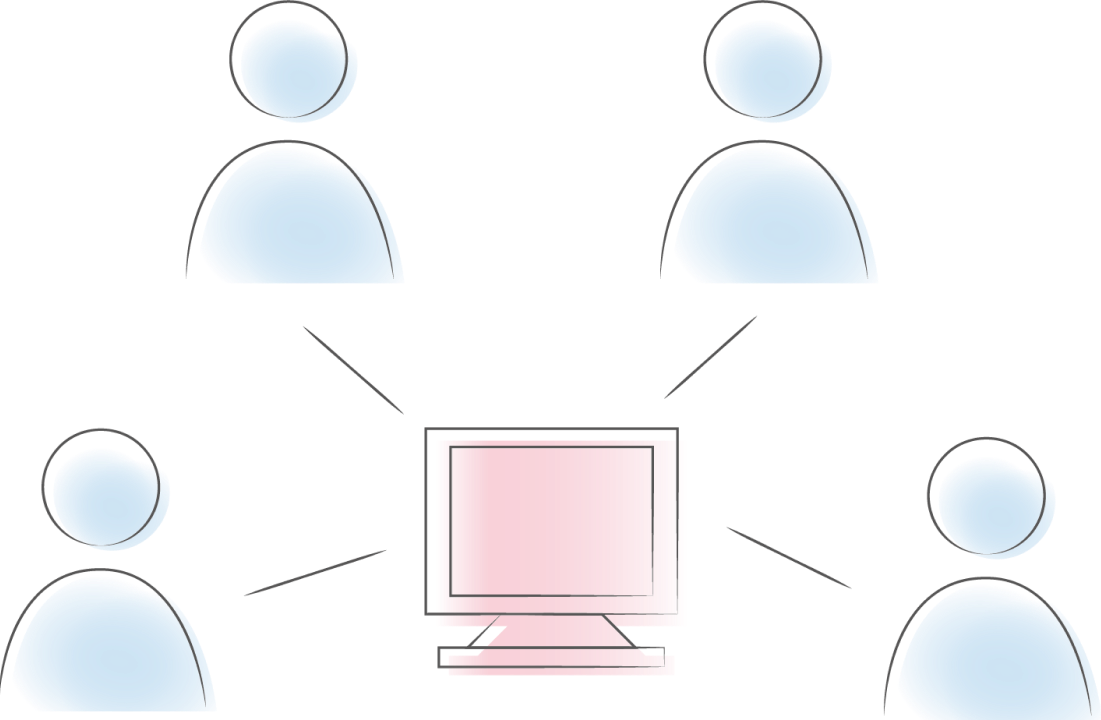

Mainframe - many people share a computer
Personal Computer - one computer, one person
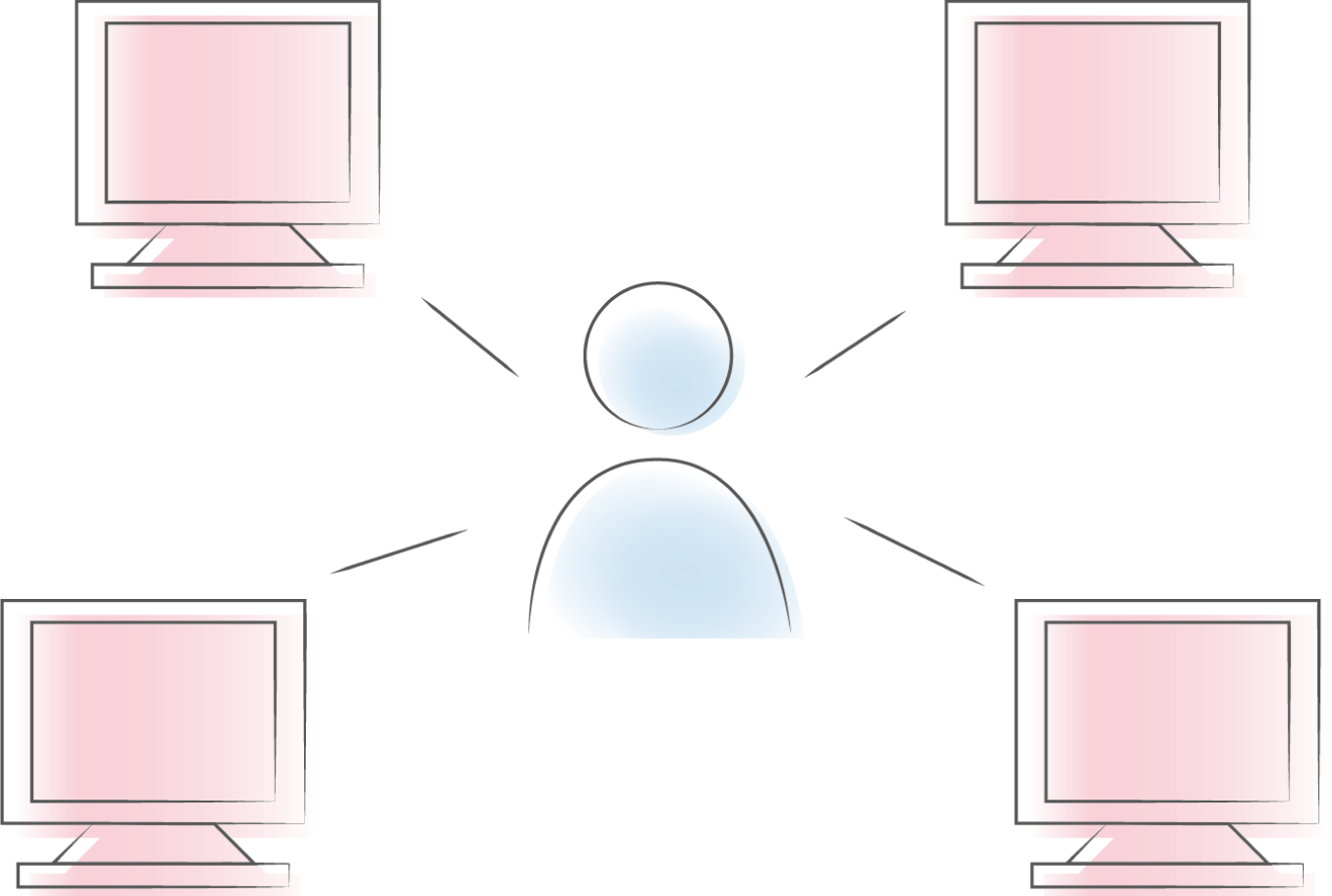
Ubiquitous Computing - every person is surrounded by many computers
"Calm Technology" was first introduced by Mark Weiser and John Seely Brown in their 1995 paper Designing Calm Technology.
The relationship between technology and us has been constantly evolving with the development of technology. As more devices become connected and demand our attention, we can no longer interact with everything in the same way. Today we are dealing with more information from all aspects of our lives, but the total amount of our attention remains the same.
Calm Technology requires providing information to users only when needed, and demand the least attention possible. Weiser and Brown believed that the difference lies in how technology captures our attention. Calm technology engages both our central and peripheral attention, switching between the two. The periphery is not unimportant; something that is on the edge at one moment may become the centre of attention in the next, as it is also critical.
Seeing and hearing are the most commonly used senses for technological notifications, that's why relying on them can lead to more clutter. By utilising other senses to compress information, we can provide more effective notifications. Touch has unique characteristics compared to vision and hearing, giving it the distinct advantages of conveying information.
Always On
The sense of touch is always available and cannot be turned off, even in situations where vision and hearing are not practical or unavailable, such as in dark or noisy environments.
Distributed
Touch is a distributed sense that can be experienced throughout the body, whereas vision and hearing are located only in the head. The large area of skin can be used as an interface for presenting the information.
Invisible
Haptic feedback can deliver information quietly without drawing attention from others. As feedback is directly transmitted to the user, it can provide valuable information without alerting or disturbing people nearby.
Multi-parameters
Haptics is composed of many unique parameters, whether it is the characteristics of the material being touched, such as texture, hardness, moisture, stickiness, or the pressure, pulling, vibration, skin movement, and chemical stimulation that the skin can sense.
Private
Haptic feedback is a personal sensory experience, a visceral and intimate experience that is "felt from within" compared to any other form of digital communication.
Emotional
Touch is a social mode of communication. Reaching out to touch others enters their personal space, expressing our intentions and effectively conveying our emotions. Receiving touch from others also contributes to our physical and mental well-being, reduces stress levels, and strengthens our connections with others.
References:
Case, A. (2016). Calm Technology. O’Reilly Media, Inc.
Weiser, M. & Brown, J.S. (1995) Designing Calm Technology. Xerox PARC. Available at: https://calmtech.com/papers/designing-calm-technology. html (Accessed: 15 February 2023).
Weiser, M. & Brown, J.S. (1996) The Coming Age of Calm Technology. Xerox PARC. Available at: https://calmtech.com/papers/coming-age-calm-technology. html (Accessed: 15 February 2023).
Developed from
Touch gestures used between people
The sense of touch is capable of extremely high resolution and sensitivity. Unfortunately, most haptic signals are one-bit notifications, simply indicating whether something has turned on or off, such as when we receive a message or our alarm clock goes off. Haptic signals are not just limited to a single buzz, there is a wide range of haptic sensations that can be produced.
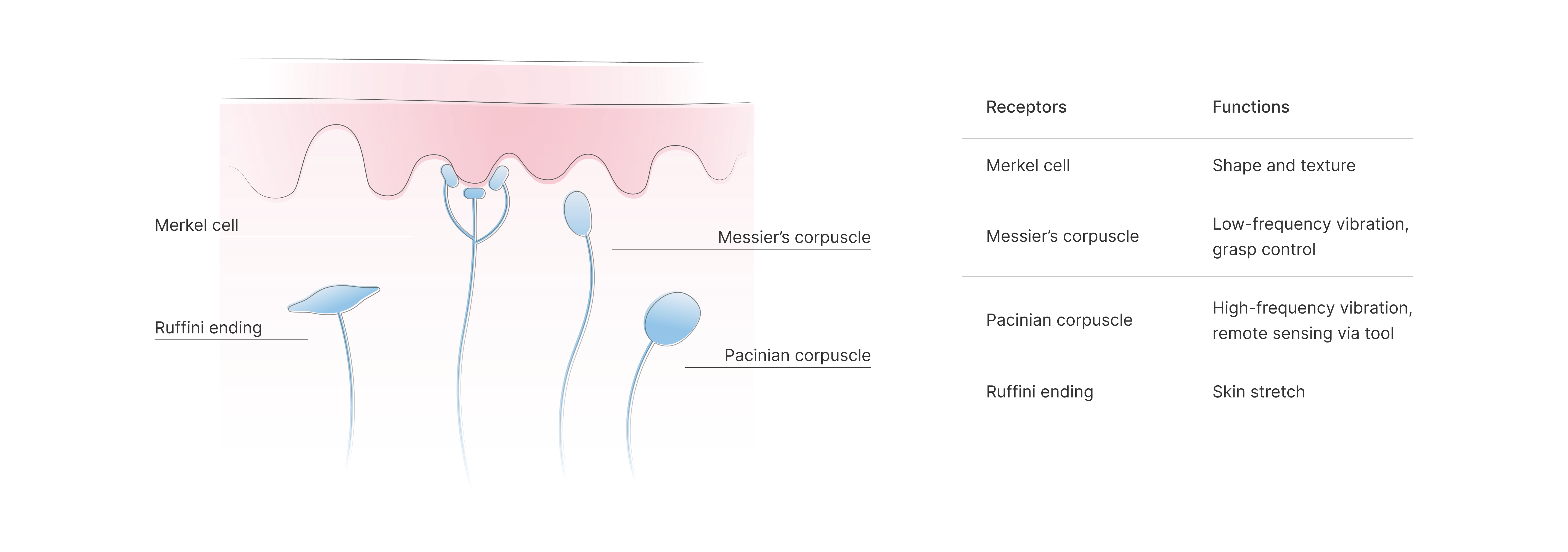
Tactile receptors are found all over the body, in both hairy and glabrous skin. They are specialised to acquire information about different aspects of the tactile world. The four classic mechanoreceptors described below demonstrate the versatile tactile capabilities of the skin.
Can touch communicate specific emotions?
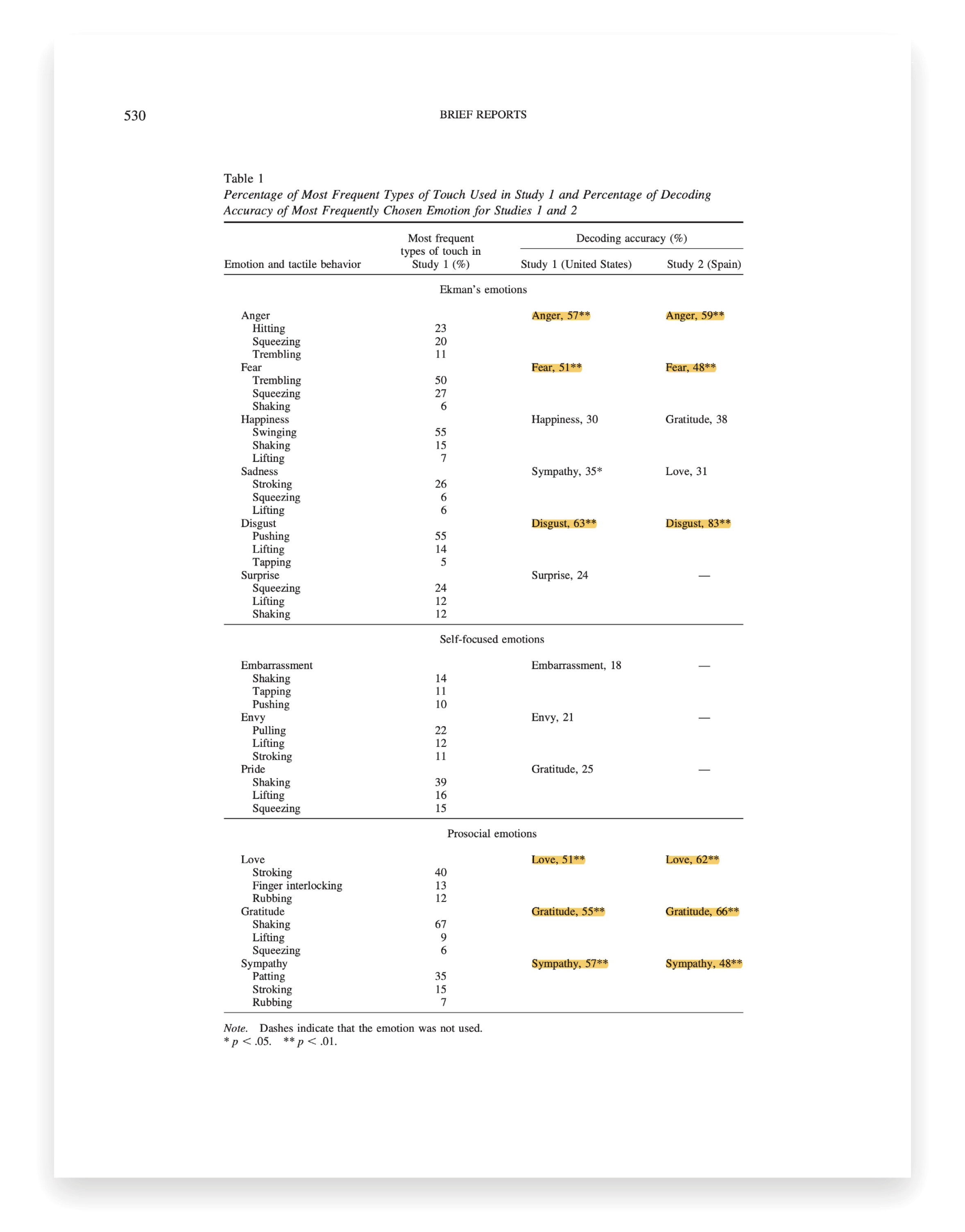
Experiments by Matthew J. Hertenstein unravel the mystery of the role social touch plays in emotional communication. The subjects were divided into encoders and decoders. They were separated by a black curtain, unable to see each other or talk to each other. The encoders were sequentially shown one of twelve emotions and then tried to convey that emotion by touching the decoder's forearm. The decoder chooses the encoder's intention from twelve emotions or "none of the above."
The results showed that the participants were able to decode six emotions at a level above chance: anger, fear, disgust, love, gratitude, and empathy, with accuracy ranging from 48% to 83% for accurately decoding the emotions. Furthermore, each emotion is associated with a specific tactile behaviour. For example, sympathy is associated with stroking and patting, anger is associated with hitting and squeezing, disgust is associated with pushing movements, and fear is associated with shaking.
Inspired by this experiment, I decided to extract patterns of tactile feedback from the tactile communication gestures between people. Firstly, the rich tactile gestures cover various patterns, fully tapping into the tactile ability of the skin. Secondly, these tactile languages are familiar to us because they come from our daily life, and we have learned their grammar unconsciously, so people can more likely understand them intuitively. Thirdly, they are natural and emotional, helping to create a sense of pleasure in interaction, without making people feel mechanical.
Therefore, I gathered numerous haptic behaviours between people, mainly focusing on those that occur on the arm, as this is the part of the body where tactile communication often takes place and is a body part that most people are comfortable being touched.
Based on the characteristics of these tactile gestures, I classified them into three categories: directional motion on the skin (relative movement on the skin), brief pressure, and sustained area pressure (greater contact area and longer duration of pressure). To further distinguish these tactile gestures, I found that they differ mainly along three dimensions: duration, intensity, and contact area size.
Directional motion

Stroking
long duration
low intensity
big contact area

Rubbing
medium duration
medium intensity
medium contact area

Scratching
medium duration
high intensity
small contact area

Tickling
medium duration
medium intensity
small contact area
Brief pressure

Tapping
short duration
low intensity
small contact area

Poking
short duration
high intensity
small contact area

Patting
short duration
low intensity
medium contact area

Pushing
medium duration
high intensity
medium contact area
Sustained area pressure

Squeezing
long duration
high intensity
big contact area

Pressing
medium duration
high intensity
small contact area

Pinching
short duration
high intensity
small contact area
References:
Hertenstein, M. & Keltner, D. & App, B. & Bulleit, B. & Jaskolka, A. (2006) Touch Communicates Distinct Emotions. Emotion (Washington, D.C.). 6. 528-33. 10.1037/1528-3542.6.3.528.
Jones, L.A. (2018) Haptics, The MIT Press essential knowledge series. Cambridge, Massachusetts: The MIT Press.
Linden, D.J. (2015) Touch: The Science of Hand, Heart, and Mind. Penguin Books.
Implemented by
Servo motor
To translate these parameters into tactile sensations, I needed to find the appropriate technology. When designing tactile prototypes, it is crucial to be able to truly feel the feedback. Only when the prototype can apply stimulation on the skin can tactile feedback be effectively evaluated. Nowadays, There are various technologies used to develop tactile interfaces, and the properties and abilities of each technology will affect the tactile sensations that can be conveyed.
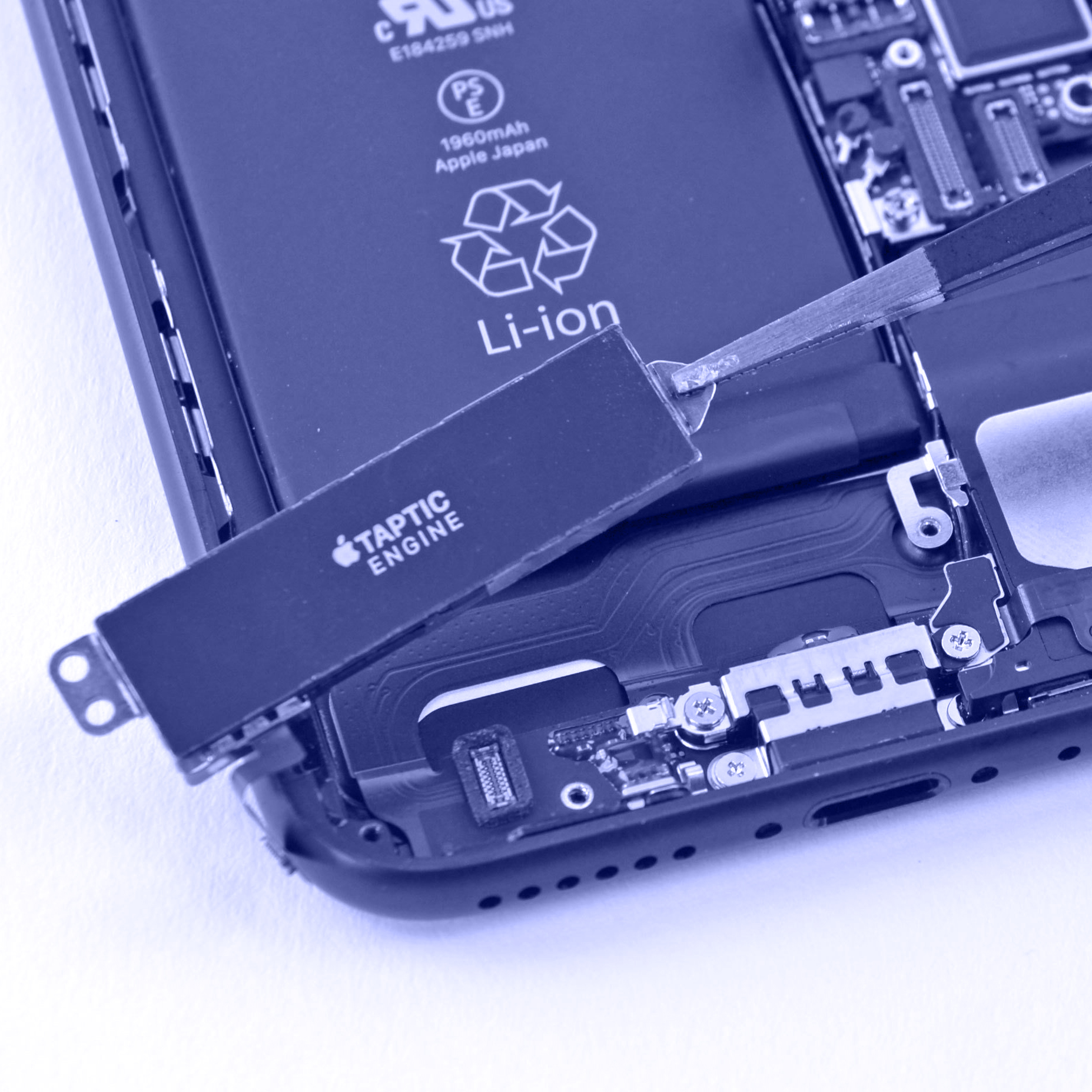
Vibrotactile
Taptic Engine, a linear actuator developed by Apple.

Electrotactile
BrainPort developed by Paul Bach-y-Rita.
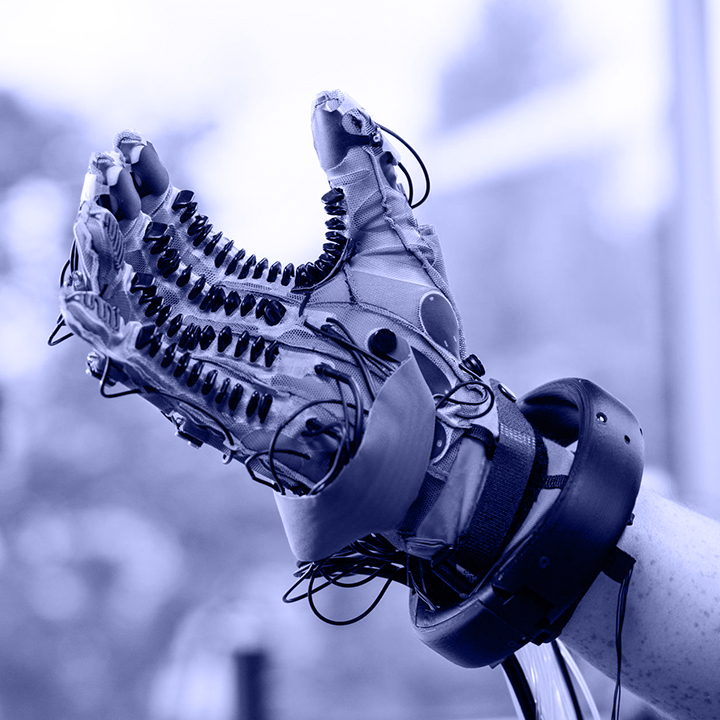
Pneumatic tactile
Haptic Glove developed by Meta Reality Labs.

Coil-based mechanical tactile
Skin Drag developed by Ion et al.
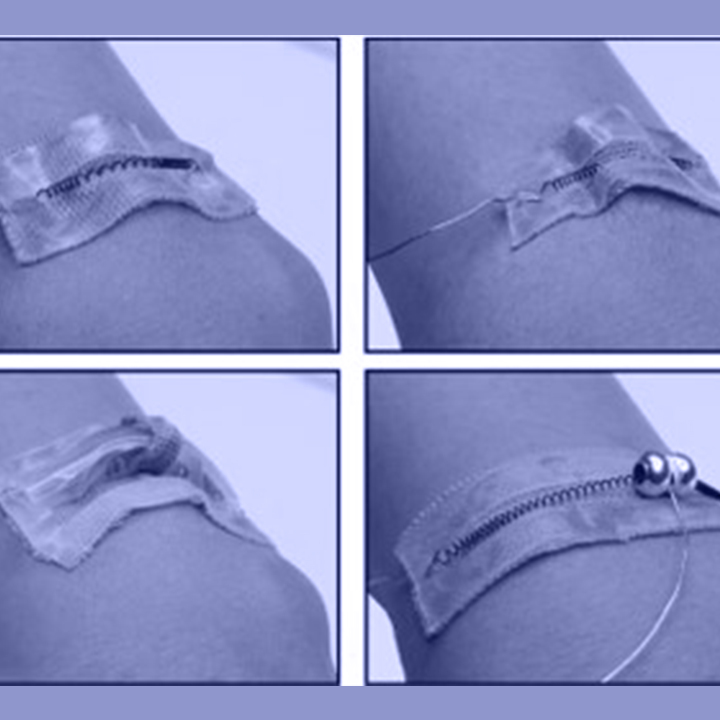
Shape memory alloy
Springlets developed by Hamdan et al.
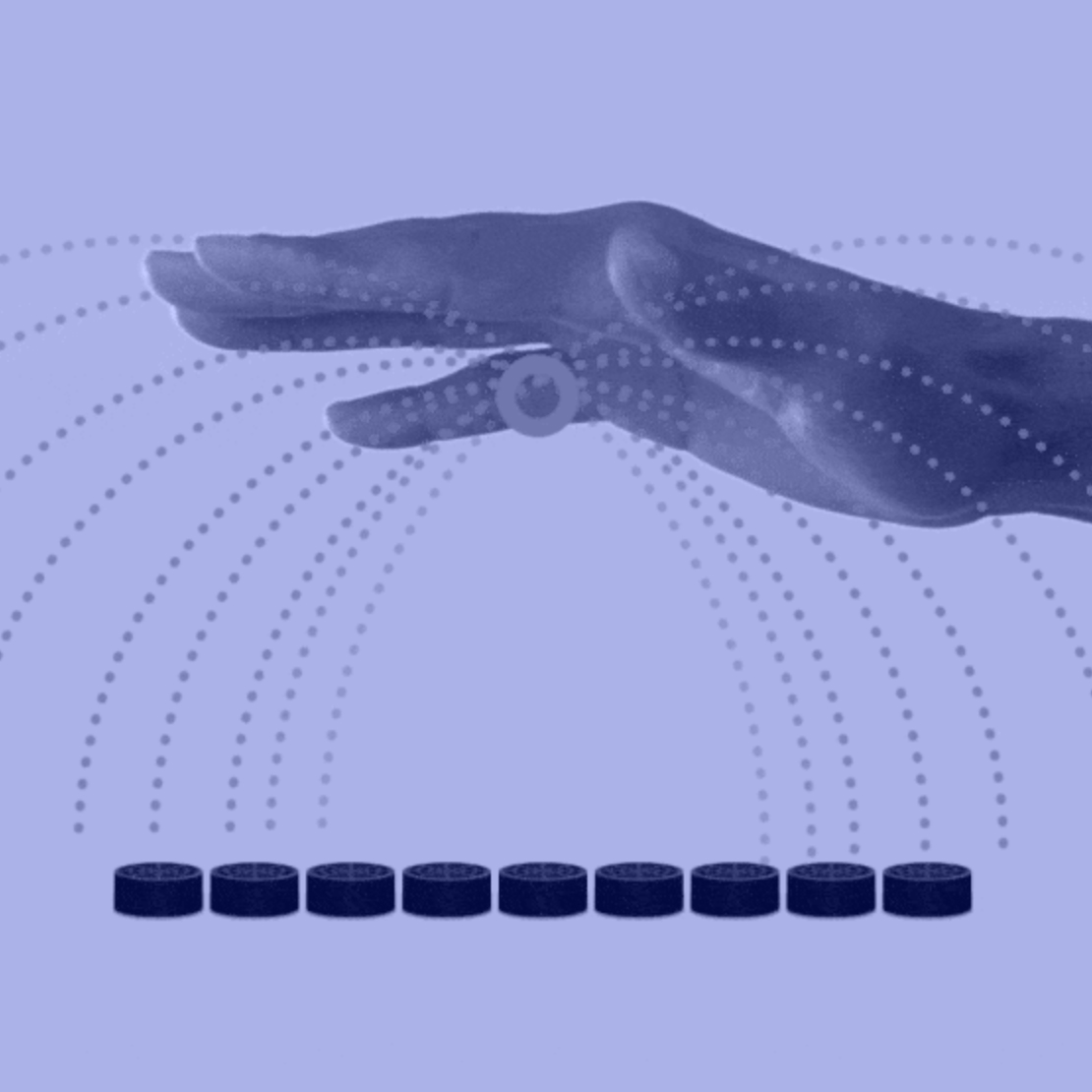
Airflow/Ultrasound
Ultrahaptics developed by Ultraleap.

Chemical tactile
Chemical Haptics developed by Lu et al.
Among these technologies, I chose three to explore: vibration motors, servo motors, and shape memory alloys. After evaluation, their working principles have the potential to reproduce the expected tactile gestures. Secondly, they are all relatively easy-to-get technologies, with low costs and not very high technical barriers, making them suitable for rapid prototyping and testing of tactile feedback.

Vibration motor
Advantages:
1. Small and compact in size
2. Provide subtle and various vibration feedback through fine signal control.
3. Can be precisely controlled to achieve short and crisp haptic feedback.
Drawbacks:
1. Difficult to mimic a wide range of tactile gestures of real-world experiences.
2. Continuous vibration can be annoying to some users.
Servo motor
Advantages:
1. Accurate speed and angle control.
2. New haptic patterns can be explored by applying tangential forces on the skin, such as providing directional haptic feedback.
Drawbacks:
1. Inevitable noise.
2. Relatively big in size for wearables.
3. Hard outer shell.
Shape memory alloy
Advantages:
1. Flexible and adaptable to various structures, particularly suitable for wearable devices.
2. Can also provide new haptic patterns by applying tangential force to the skin.
Drawbacks:
1. Energy inefficient, as it requires heating and cooling time.
2. Requires higher energy input.
3. Low controllability.
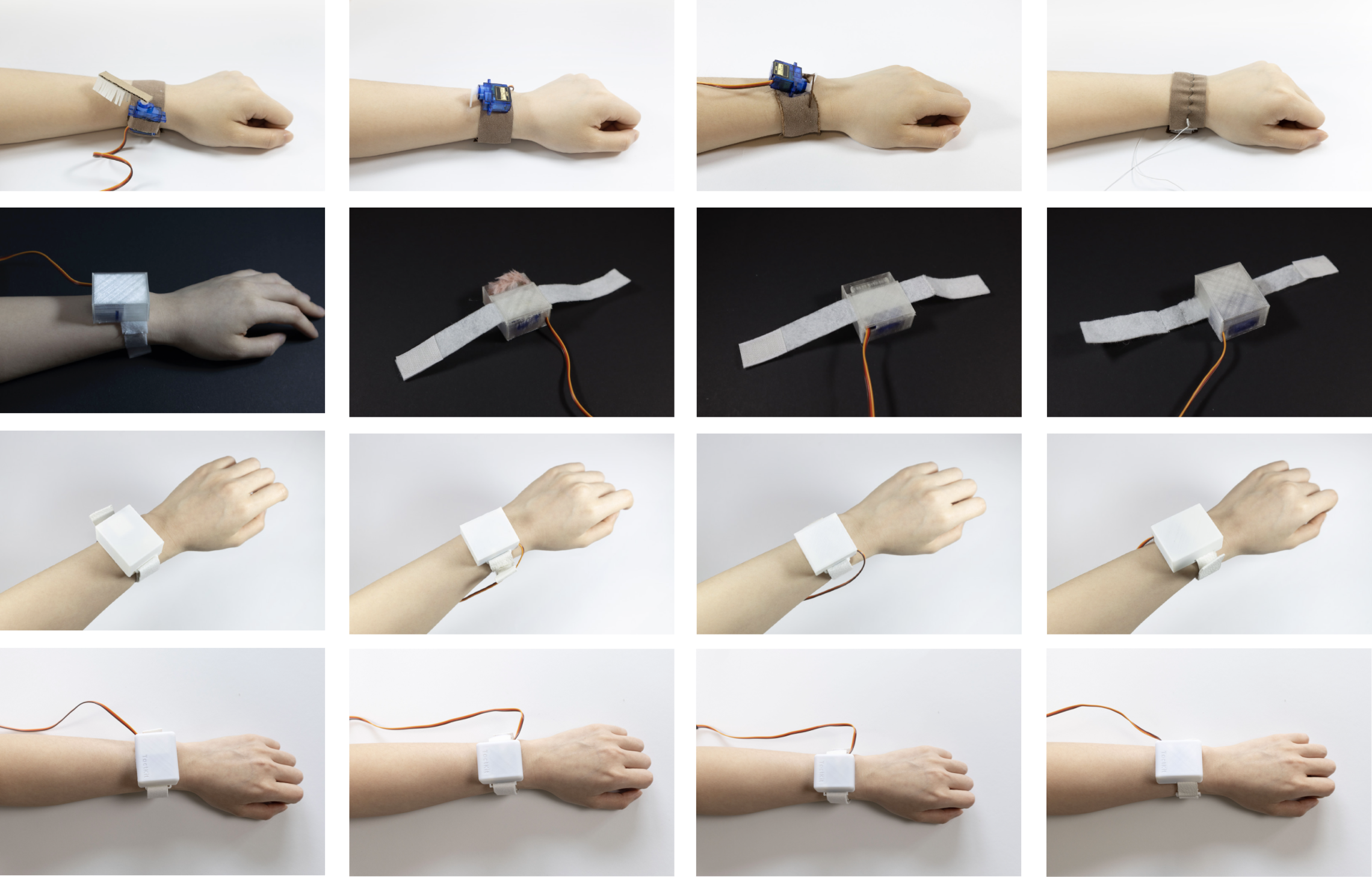
During the exploration process, I created many working prototypes. After the prototyping and user testing, I found that all three technologies were able to produce effective haptic feedback, but they each had their pros and cons. I decided to further implement tactile feedback using servo motors. Through experimentation, I found that the servo motor allows for precise speed and angle control, and can apply force in different directions on the skin, making it a suitable choice for simulating different tactile gestures.
On the other hand, vibration motors are not suitable for simulating rich tactile experiences in the real world. Additionally, vibration feedback is already a relatively well-studied area, so I decided to exclude it from my project. Shape memory alloys have the issue of heat dissipation, it requires time for heating and cooling, and their control accuracy is relatively low. So servo motor is the ideal choice for my project.
When considering tactile interfaces, another aspect is the distance between the tactile interface and our body, which can be divided into three dimensions: non-contact devices, independent devices, and wearable devices.
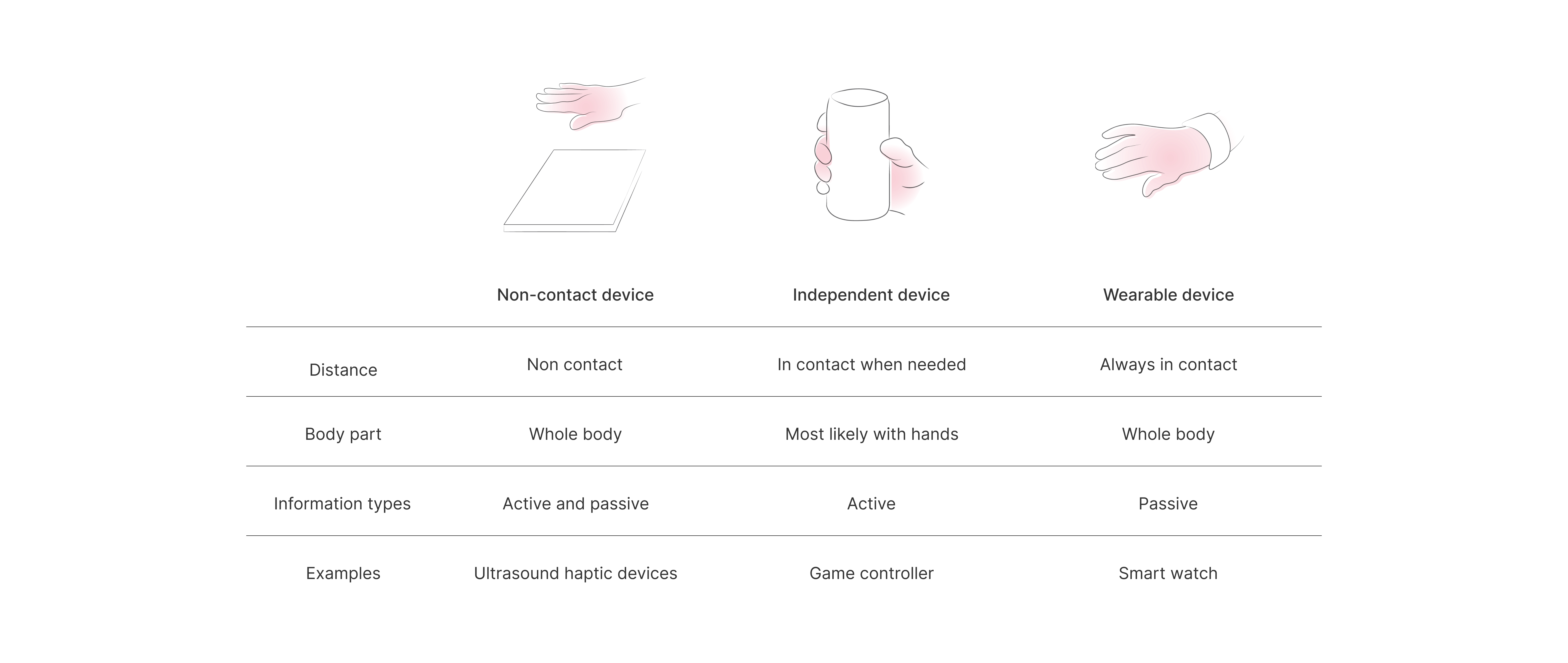
After comparing the three dimensions of tactile interfaces, I chose to focus on wearable devices. The reasons are as follows: Firstly, in user testing, participants gave more consistent evaluations of haptic feedback from wearable devices, which can better convey the intended tactile gestures.
Secondly, since the tactile feedback I created is based on the tactile gesture pattern between people, for the recipient of the touch, the touch usually occurs in positions such as the arm and shoulder, which is more consistent with wearable devices.
Thirdly, in the context of calm technology, compared to the other two tactile interfaces, the wearable interface is less invasive, and the passive touch can provide ambient information. When people's visual attention or hands are occupied by other tasks, users can still receive tactile feedback without obstacles, which is beneficial for multitasking environments.
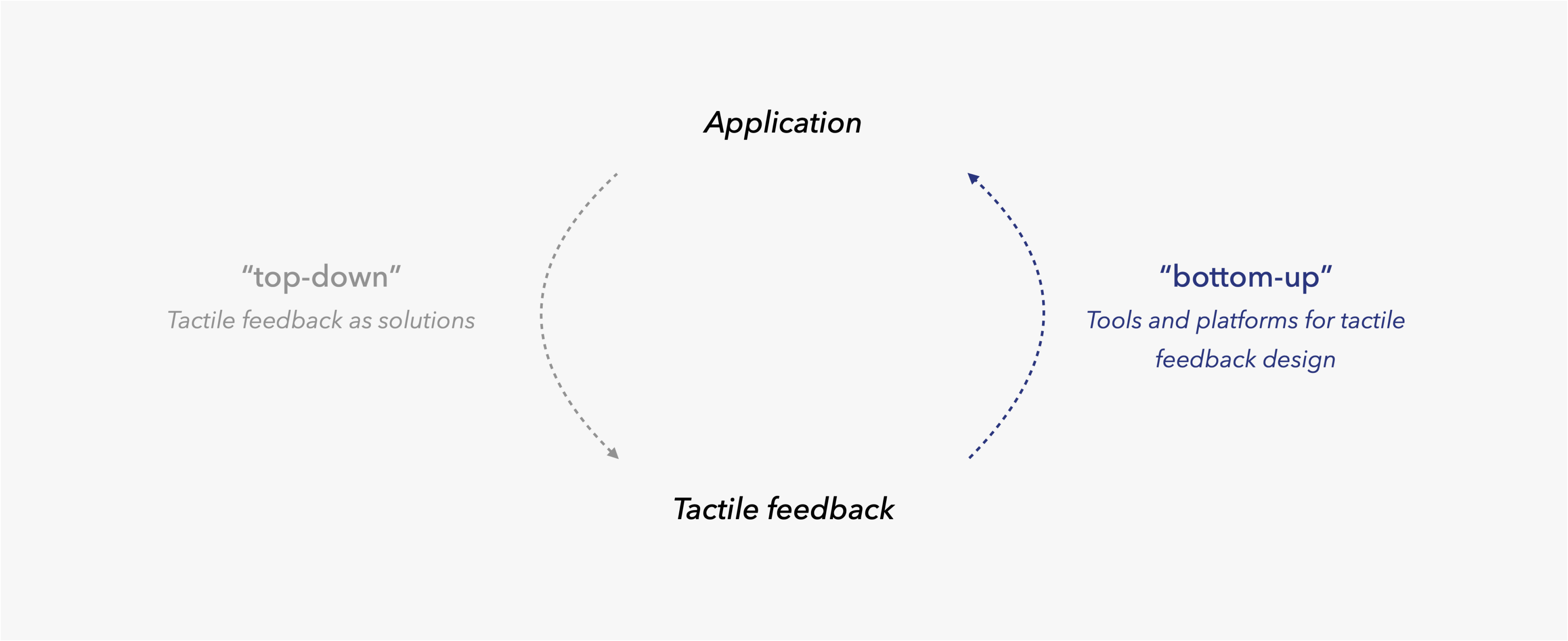
In this project, the design of tactile feedback patterns is placed at the centre. Generally speaking, there are two methods for designing tactile patterns. The first is a "top-down" approach, where designers create effective interactions and feedback to a given application. Tactile feedback is a tailored solution for the application. However, this approach requires designers to have an understanding of feedback design tools and their capabilities. The "bottom-up" approach, on the other hand, is to create tools and platforms for tactile design, expand the library of tactile feedback, and engage in discussions and give support when designing tactile feedback. In this project, I adopted the "bottom-up" approach, starting from the tactile feedback patterns to explore and provide a foundation for potential applications.
References:
MacLean, K.E. (2000) Designing with Haptic Feedback. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 2000, pp. 783-788 vol.1, 10.1109/ ROBOT.2000.844146.








